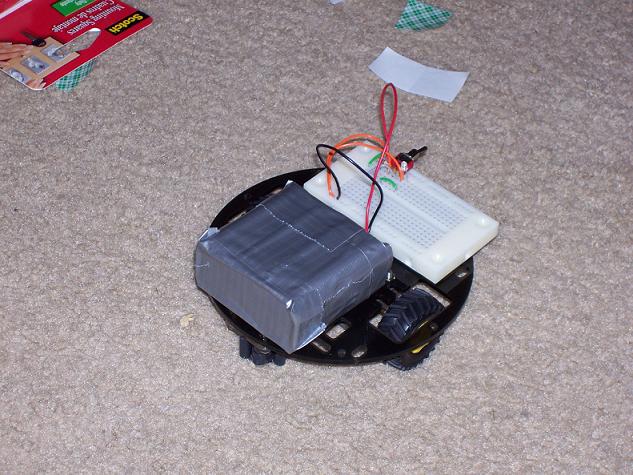
Platform + Motor Control + Power
posted by Steve Spalding at 8:57 PM
|
0 comments
![]()
EEL 5666: Intelligent Machine Design Laboratory University of Florida
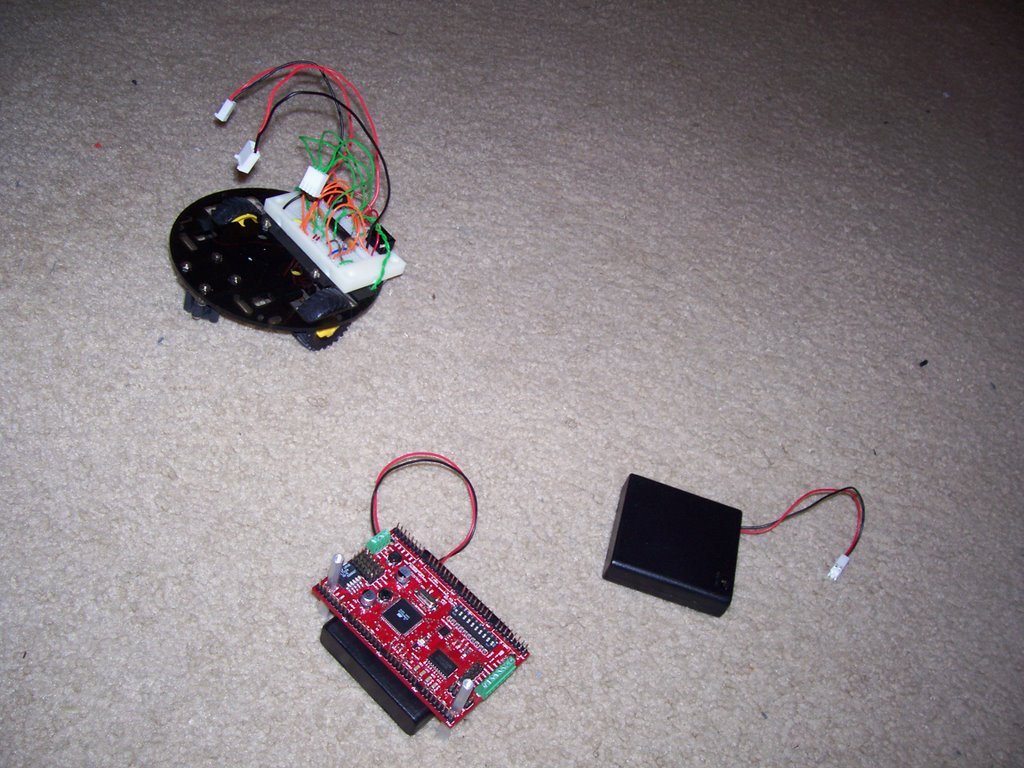
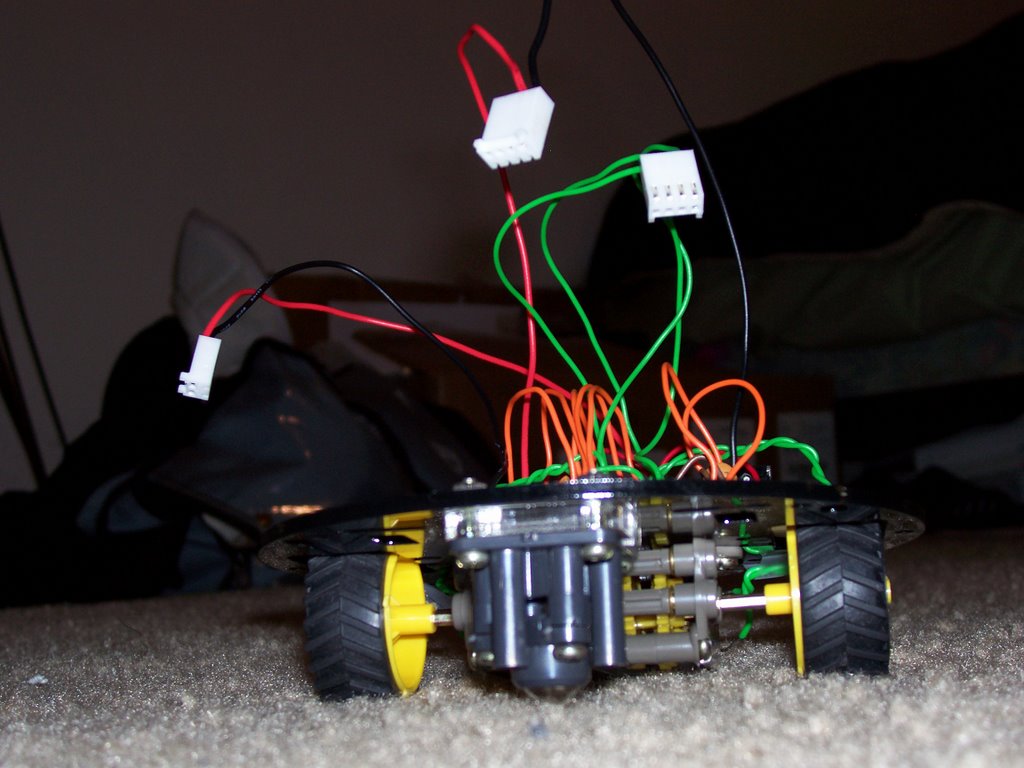
The major problem I have run into this week involves my motor controller. It turns out that the TNX0 screw header on the Maveric-II board does not actually drive TTL values as the documentation implies. Instead, even with the appropriate switch flipped you still have to get the TTL values from PORTE. As a result, I am fairly certain that I ran -6 volts (still far too low, I am starting to wonder about the level shifter) across my controller. If it did ever work properly, it doesn't now. Fortunately, when I saw that something was wrong I put out an order for a few H-Bridges. While these don't provide as much functionality as the motor controller they should be perfectly appropriate for the application. A secondary problem is finding a place to mount an LCD, I need to wait until I see how much room my H-Bridge leaves me before trying to place the LCD.
posted by Steve Spalding at 2:27 PM
|
0 comments
![]()
Since this site is supposed to detail all of my progress while building Tracker I'm taking a little time out to point out something important that I've learned thusfar.
posted by Steve Spalding at 7:05 PM
|
1 comments
![]()
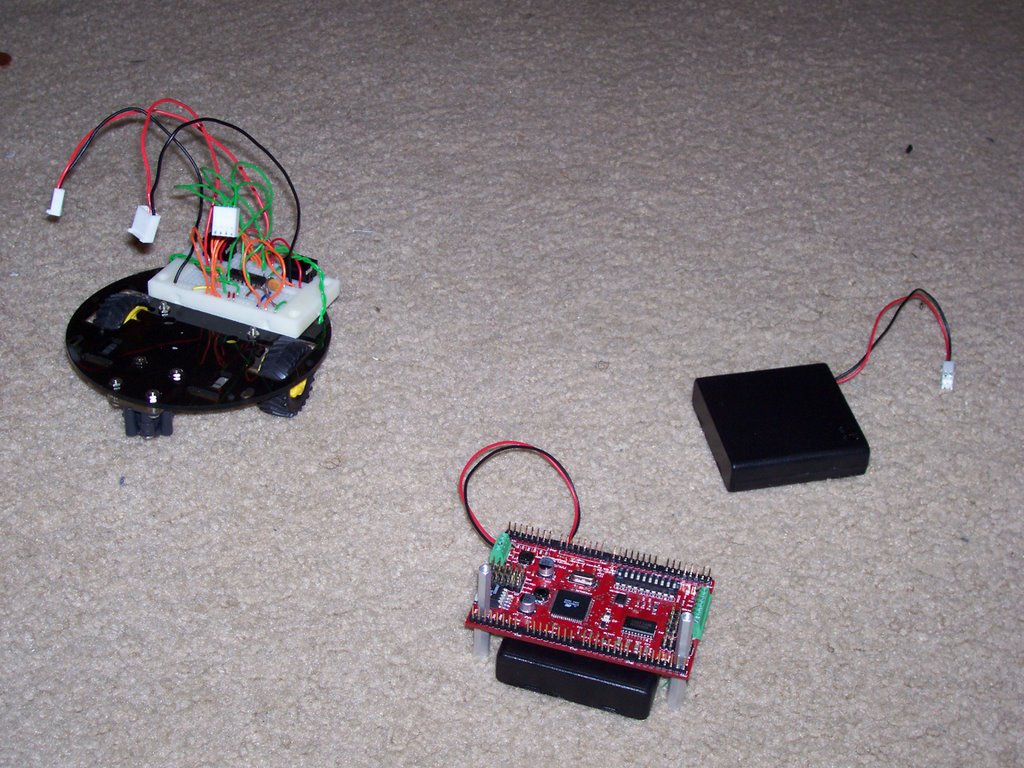
This wednesday the rest of my parts (IR Sesnors / Perf Board / Photoelectric cells / Cables / Wires and Headers) came in. I finished writing the test version of my motor controller code. The an updated version will be completed once I mount the sensor suite.
posted by Steve Spalding at 7:03 PM
|
0 comments
![]()

posted by Steve Spalding at 4:43 PM
|
1 comments
![]()


posted by Steve Spalding at 3:48 PM
|
0 comments
![]()
Steve is an Electrical Engineering student at the University of Florida.
