Proposal -- First Draft 5.31.06
1. Opening
A. Abstract
B. Executive Summary
C. Introduction
2. Body
A. Integrated Systems
B. Mobile Platform
C. Actuation
D. Sensors
E. Behaviors
F. Experimental Layout and Results
3. Closing
A. Conclusion
B. Documentation
C. Appendices
Abstract
The purpose of my robot is to find and track a radio frequency beacon without the need for line of sight. Once acquired, the robot will track the target and take a photograph. If the robot is discovered it will go towards the nearest dark corner until it is safe to re-acquire the target.
Executive Summary
N/A
Introduction
The major problem that this robot seeks to solve is a question of finding people and objects that may be moving without having to be physically present. A robot of this nature could be used in order to track stolen vehicles, find people in emergency situations, and otherwise to search for and record when it is impossible for a human being to get line of sight.
When completed the robot should be able to track a moving or stationary radio frequency beacon, change direction dynamically and follow that target, determine the distance to the target and decide whether it is “too close”. When it decides that it is within a dangerous range it will go towards the darkest available corner and wait.
This paper will step through the sensor packages and design considerations of this robot, as well as providing information about its mechanical construction and programming steps necessary to make it functional.
Integrated System
Mobile Platform
The robot will be based on Pololu 5” robot chassis. The small size was chosen in order to make the robot as discrete as possible. It reduces the robot’s visual signature for clandestine operations.
Actuation
I plan on using the Tamiya twin motor gearbox, ball caster and truck tires for locomotion. The motors will be controlled electronically by Pololu’s dual motor serial motor controller. For a light weight robot this should provide both ease of construction and sufficient power.
Sensors
N/A
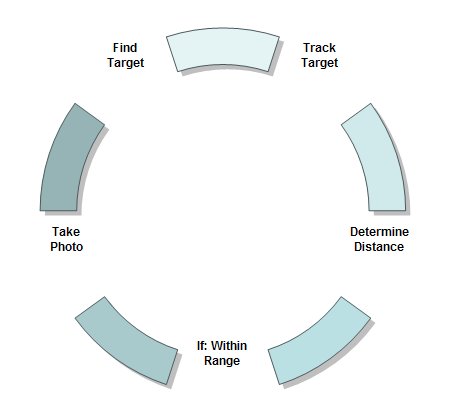
Behaviors
The robot will have four main behaviors.
Target acquisition: The robot will determine the location of a beacon and rotate in the direction of the target.
Tracking: Once acquired, the robot will try to keep a safe distance from the target and will adjust its speed in order to maintain proximity.
Obstacle Avoidance: Basic obstacle avoidance behaviors will be available.
Hiding: If the robot is within a dangerous proximity of the target, it will search for a corner of the room with the smallest amount of light and wait there for a pre-determined amount of time.
The robot may also have an onboard camera to take pictures/video of the target at a given interval.
Experimental Layout and Results
N/A
Conclusion
N/A
Documentation
N/A
Appendices
N/A
posted by Steve Spalding at 9:44 PM
![]()

0 Comments:
Post a Comment
<< Home